Ръчно манипулатор със собствените си ръце: как да го направя?
Ще разгледаме как се извършва манипулаторътсъс собствените си ръце, върху промишлен дизайн. На първо място ще бъдат засегнати общи въпроси, след това техническите характеристики на резултата, подробностите и накрая самият процес на сглобяване.
Общо и общо

Технически характеристики на резултата
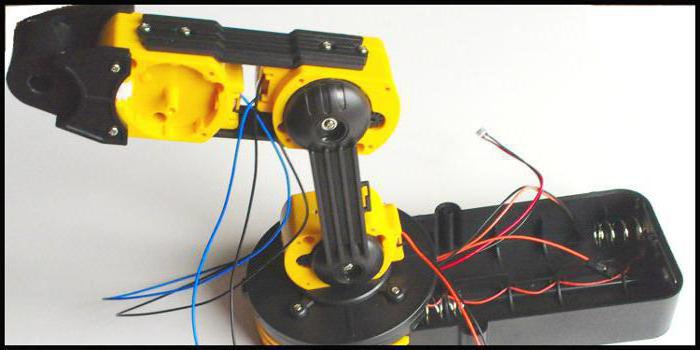
Ще бъде разгледана проба с параметридължина / височина / ширина съответно 228/380/160 милиметра. Тежестта на манипулаторната ръка, направена на ръка, ще бъде около 1 килограм. За управление се използва кабелно дистанционно управление. Приблизителното време за сглобяване при наличие на опит е около 6-8 часа. Ако не е така, тогава дни, седмици могат да изчезнат и със съучастие и месеци, така че да се събере ръчния манипулатор. С ръцете си и един в такива случаи, струва си само да го направите за собствения си интерес. За движението на компонентите се използват колекторни двигатели. С достатъчно усилия можете да направите устройство, което ще се върти 360 градуса. Също така, за удобство на работата, освен стандартните инструменти като спойка и спойка, е необходимо да се натрупат:
- Разширени клещи.
- Странични гърчове.
- Отвертка с напречна глава.
- 4 батерии от тип D.
Дистанционното управление може да бъдеосъществява с помощта на бутоните и микроконтролер. Ако желаете да направите безжично дистанционно управление и контрол на действията ще трябва ръчно да манипулатор. Както ще единствените устройства (кондензатори, резистори, транзистори) са необходими като добавки, които ще се стабилизират схема и предават по нея в желания интервал от време, необходимо текущата стойност.
Малки подробности

Също така трябва да се погрижите за проводницитене усложняваше движенията си. Най-доброто би било да ги постави в структурата. Можете да направите всичко отвън, този подход ще спести време, но потенциално може да доведе до трудности при преместването на отделните възли или на цялото устройство. И сега: как да направите манипулатор?
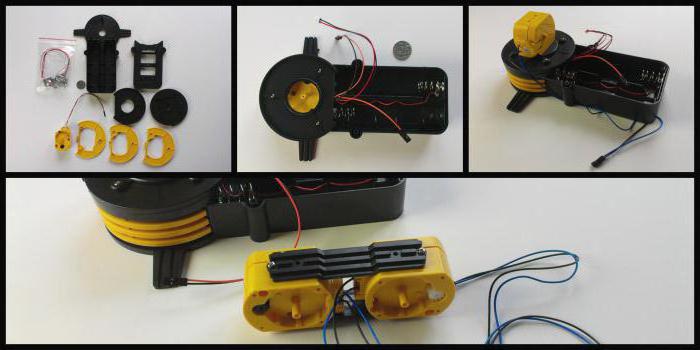
Общо събрание

- Монтаж на два двигателя. Всеки от тях ще отговаря за обръщане в определена посока. Когато човек работи, другият е в покой.
- Инсталиране на един двигател с верига, която може да го завърти и в двете посоки.
Кои от опциите за избор зависиизключително от вас. Следващата е основната конструкция. За комфорта на работата са необходими два "стави". Към платформата трябва да бъде в състояние да се огъват в различни посоки, че е решен от двигателя, който се поставя в основата му. Един или повече двойка трябва да бъде поставен на мястото на лакътната завоя за захващане част може да се движи по протежение на хоризонтални и вертикални линии на координатната система. Освен това, ако искате да получите максимално възможно, можете да инсталирате друг двигател в китката. Освен това, най-необходимото, без което ръчно манипулаторът не се появява. Ръцете ще трябва да направят самото улавяне. Има много възможности за внедряване. Можете да дадете съвет на двата най-популярни:
- Използват се само два пръста, коитоедновременно стиснете и разкопайте обекта за улавяне. Това е най-простото внедряване, което обаче обикновено не може да се похвали със значителна носеща способност.
- Изработва се прототип на човешката ръка. Тук за всички пръсти може да се използва един двигател, с помощта на който ще се извърши прегъването / удължаването. Но можете да направите проекта по-труден. Така че е възможно да се свържете с всеки пръст на двигателя и да го контролирате отделно.
Тогава остава да направим устройството за дистанционно управлениеще засегне отделните двигатели и темпа на тяхната работа. И можете да започнете експериментите с помощта на роботизирана ръка, направена със собствените си ръце.
Възможни схеми на резултата
Всяка представена манипулационна верига може да бъде подобрена.
заключение